基于油耗优化和缓冲区安全距离的4D协调轨迹规划
交通四创——基于油耗优化和缓冲区安全距离的4D协调轨迹规划
一、项目概况
所属专题 |
|||
■智能技术与智能交通系统工程专题 |
□交通规划管理与大数据应用专题 |
||
□轨道交通控制与维保技术专题 |
□轨道交通设施设计与运营管理专题 |
||
指导教师情况 |
|||
指导老师1: |
钱雄文 |
职称1: |
助理教授 |
项目组成员 |
|||
19级交通运输(姚纪伟、董德森、车善龙、覃浏如、陈昊) |
|||
项目期限: |
|||
2021年3月-2021年12月 |
|||
二、项目简介
空中交通管理(ATM)系统包括空中交通服务、空中交通流量管理和空域管理三个部分。在当前的ATM系统中,空域被划分为多个扇区。空中管制员的一个小组被指定去负责一个扇区。起飞后,在负责各部门的空中交通管制员的指导下,一架飞机根据它的飞行计划沿着航线穿过一个又一个扇区的航线飞行,直到到达目的地机场。空中交通管制员不仅根据飞机当前的位置和速度来指挥飞机,还有未来他们预期的4D轨迹也是基准之一。在飞机进入扇区之前,机载飞行管理系统(FMS)将计算并提交穿越该扇区的首选4D轨迹。因为轨迹是单独和独立规划的,它们可能导致冲突或拥挤,ATM系统或是空中交通管理员需要借助决策支持工具在收到的4D轨迹之间进行协调,进行必要的修改,甚至重新规划。
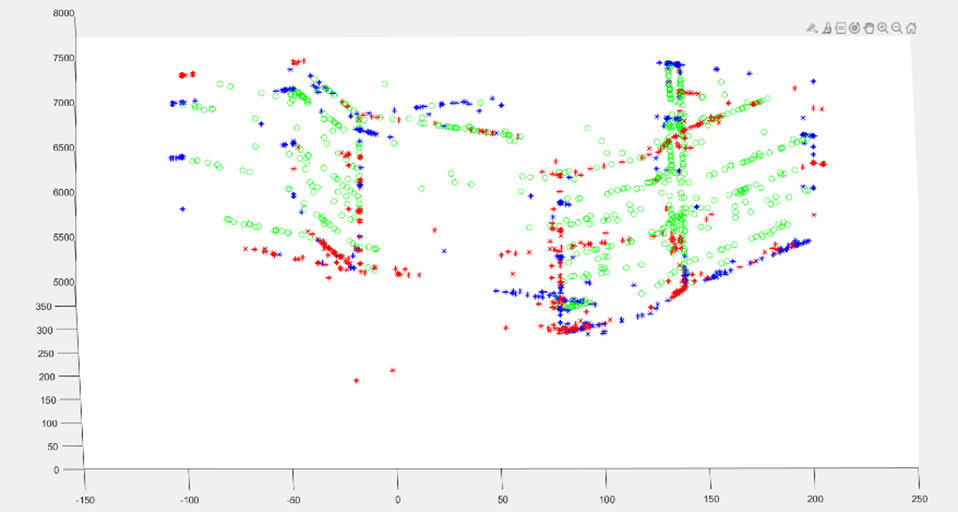
图1 四维航迹点可视化

图2 项目组成员讨论问题
三、项目成果
2021年度深圳技术大学数学建模比赛 三等奖

图3 校数学建模比赛获奖证书