主持人:冯平
冯平教授的项目“基于分水岭变换的 PCB缺陷机器视觉检测算法研究”得到深圳市科技研发资金资助(JCYJ20140418091413575),主要研究了基于分水岭算法的面阵相机阵列 PCB 自动光学检测设备的若干关键技术,针对传统线阵相机的扫描进行深入了解和研究的同时, 创造性的提出基于面阵相机阵列的扫描模式,通过计算在理论上证实了面阵相机阵列的特点及优势。
其间经过硬件选型、硬件搭建、软件搭建以及算法实现及验证等多个阶段。硬件选型阶段通过采取多种方案参数的优劣对比,实验数据的证实等方法选择合适的硬件作为搭建前的准备;硬件搭建阶段则通过满足相关需求,自主搭建完成系统所需的硬件框架结构,确保整个系统硬件部分的完整和统一;在软件搭建阶段则通过对相关检测需求的层层划分,编程实现软件界面相关功能;在算法验证及集成阶段则通过大量测试工作,保证算法的高效和稳定,并成为整个系统最为核心的部分。项目主要完成了以下几个方面内容:
1)构建整体系统框架结构设计,完成系统各种需求,在原有研发基础上提出切实可行的改进需求并实现相关环节。
2)实现智能化图像采集系统的集成,通过选型对比,选择合适的硬件设备,配合理论验证,搭建相关采集平台。实验证明采用面阵相机阵列单次曝光配合运动机构可以减少采集时间,提高采集效率。图像采集平台如图1所示。
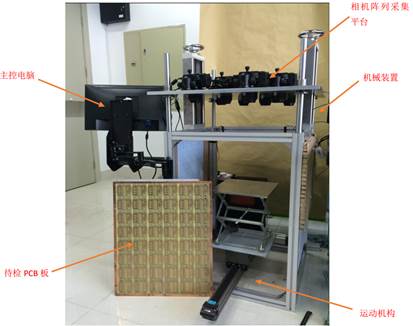
图 1 图像采集平台
3)完成缺陷检测识别算法的研究,根据算法实现流程,对比现有算法相关特点,通过实验结果证实,最终实现基于改进分水岭算法的缺陷检测识别算法。实验证明针对实际大小为 600mm´370mm,分辨率为 33334´20556 pixels 板而言,本系统采用缺陷识别算法用时约 11s,通过测试可以发现该算法具有一定的自适应性且极大降低了错检率。缺陷检测识别算法得到的结果如图2所示。
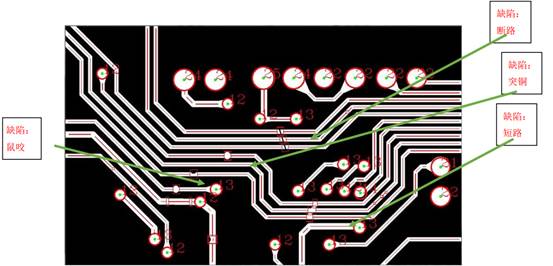
图 2 PCB板局部及缺陷检测识别算法结果
4)完成整个系统的运行和调试,包括相关其他环节的运行和联调,保证整体的协调运作。
5)完成基于改进分水岭算法的面阵相机阵列的 PCB 自动光学检测设备相关技术的研究与开发,并对系统进行验证,实验证明分水岭算法的可行性,研发的AOI设备主要指标如表1所示。
表 1 研发的AOI设备主要指标及与市场主流设备的对比
差影算法耗费时间(单位:s) |
分水岭算法耗费时间(单位:s) |
|
图像采集时间(扫描有效区域) |
20 |
7 |
Gerber文件解析成像时间 |
45 |
8 |
图像预处理时间(每小块) |
0.185 |
0.1 |
图像配准时间 |
35 |
50 |
图像缺陷识别时间 |
17 |
4 |