主持人:冯平
轨道线路维护作为轨道运营过程中的一个重要环节,轨道线路维护的质量是城市轨道交通正常运营的基本保障。近些年来,随着列车的数量和运行速度的大幅度提升以及载重量的增大,更是对轨道的维护提出了极大的挑战,要求不仅维护的周期大大缩短,而且维护的路段也在激增。轨道线路主要由钢轨,轨枕以及连接件等多个部分构成。在列车运行过程中,任何一个部分出现问题,都将直接影响列车运行的舒适性和安全性。在日益繁忙的轨道线路上,轨道的几何参数变化,钢轨和轨枕等表面的掉块、焊缝裂纹以及连接钢轨与轨枕的扣件弹条的损坏和丢失等缺陷形式较为常见。针对此类问题,冯平教授提出“轨道连接件检测机器人”,主要功能如下:
1)轨道连接件检测机器人平衡动力学分析及机械结构优化设计:通过动力学仿真实验及研究轨道交通限界资料车与检测人员工作时间段一致,检测人员人身安全受到威胁;地铁隧道空气污染严重,检测人员健康问题无法保证;隧道环境灰暗工作时间在深夜,检测人员容易出现疲劳导致错漏检;检测人员流动大,提高附加人力成本,降低检测熟练程度等方面。本项目根据地铁运营维保的需要,进行了以下内容的研究:可通过两组导向轮及从动轮轮缘等与轨道侧面力的作用,最大限度提高轨道连接件检测机器人的平衡稳定性,依据结构仿真分析与模拟测试结果,对传统的轨道车辆装置进行优化设计,增加中部导向轮及前端轮支座装置与轨道连接件检测机器人本体活动连接,降低转弯时轨侧的力的作用及蛇行运动时间。针对轨道线路设计要求范围内的线路进行现场测试及模拟测试,不断优化结构找到适宜的平衡稳定方法,提高轨道连接件检测机器人检测时的平衡稳定性。研发的小车如图15所示,重量8kg、续航时间180分钟、速度0.3-10km/h。

图 1 轨道连接件检测机器人设计图及现场工作图
2)机器人的控制系统设计:硬件方面主要由电机驱动模块、电源管理模块、传感器集成端口模块和计算处理模块四部分组成,软件方面考虑基于机器人操作系统进行控制程序的设计与优化,该操作系统可对多传感器数据融合处理、电机闭环PID控制、上位机与下位机通讯控制等。本项目通过现场测试并探索硬件和软件两部分的布局与融合,探索出一种能够获取到高质量检测图像的机器人控制系统。
3)隧道内定位与导航技术:本项目将从隧道内环境特点出发,分析对比机器人室内定位与导航采用的视觉SLAM、参照定位法、基站定位法、航位推算法、地图匹配法及列车定位采用的轨道电路、计轴器、查询/应答器、RFID定位标签等定位方法,扬长避短或混合设计,找出适合的方法,并通过隧道现场测试进行改进和优化。实现的定位精度达到1cm,定位时间约为0.01秒。
4)扣件脱落、接板螺栓脱落、焊缝裂纹等缺陷的识别算法:模式识别算法通过监督识别的方法在已知的训练样本所属类别的条件下设计分类器。根据《GB50911_2013城市轨道交通工程监测技术规范》与各地轨道交通运营维检部门检修规范,结合采集系统拍摄的照片可以对不同类型的损害进行手工特征设计。通过针对性的特征设计不仅提高算了法准确度,还大大提高算了法的效率。通过轨道交通检测机器人能够采集大量轨道连接件伤损数据使用深度学习算法进行轨道连接件伤损分类与识别。在传统模式识别方法中,特征和分类器的优化是分开的。通过合理设置神经网络的框架,使得特征表示和分类器联合优化的,可以最大程度地发挥二者联合协作的性能以提高轨道连接件伤损类型的分类与识别准确率。
5)算法集成与本地处理:为避免离线处理造成的效率低下、数据冗余、管理困难等问题,设计本地图像处理系统并集成离线测试各项指标都满足要求的轨道连接件伤损识别算法。本地图像处理系统遵循轻量化、小型化、集成化、高性能化的设计原则,保证能够与轨道交通检测机器人的正常装配与图像处理算法的高效率运行。集成算法针对本地图像处理系统进行优化,通过大量在线测试确保其与其它模块的兼容性,达到了离线测试的各项指标:零漏检、低误检率、高效率。
6)大数据分析与后台数据服务:将机器人运行相关数据与检测数据相结合进行分析,利用机器学习的方法进行学习训练分析和数据的异常值挖掘。研究后台数据服务,建立手机APP客户端、网页客户端、云服务器、数据库,设计通信模块为机器人工作过程中的各项数据提供存储空间,交互接口,及显示平台。提高用户及管理人员对检测机器人的产品体验。实现的信息系统如图2所示。
7)多台检测设备的路径规划与协同工作:根据设备的作业时间及作业范围,研究其在轨道交通线路上的站间路径关系,通过路径规划实现多台设备作业时的有序、高效、安全作业。研究多台设备之间的信息共享机制及通信方案,实现多台检测设备作业时的相互感知,可实时修正突发状况导致的作业延迟等问题,进一步可在其中某一台检测设备发生故障时,进行自动牵引及替代检测,保持作业连续性,实现了多台检测设备的协同工作。
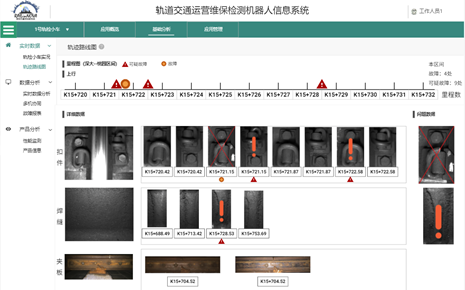
图 2 轨道交通运营维保检测机器人信息系统界面