一、团队介绍
深圳技术大学赛车工作室成立于2018年9月,是以研制燃油巴哈越野赛车、电动巴哈越野赛车、方程式赛车、无人驾驶方程式赛车,以及开展相关创新创业、公益科普活动为目标的科创组织。工作室现已组建飓风燃油巴哈赛车队、电光电动巴哈赛车队、极光电动方程式车队和AutoBots无人车队,四支车队通过学校、学院及赞助商的支持,每年设计、制造赛车,定期参加中国汽车工程学会举办的中国汽车工程学会巴哈大赛、中国大学生电动方程式大赛。赛车工作室由深圳技术大学城市交通与物流学院牵头建立,为全校各专业热爱赛车运动的学生提供一个实现梦想的科技创新平台,自深圳技术大学赛车工作室成立以来,一边成长,一边收获,一路走来,硕果累累。目前车队成员主要来自车辆工程、汽车服务工程、工业设计、物联网与大数据、国际商务等专业,工作室学生总数超过100人。
二、车队荣誉

2021年度中国汽车工程学会巴哈大赛全国三等奖

2021年度中国大学生电动方程式大赛全国二等奖
2022年度中国大学生电动方程式大赛全国三等奖

第十六届全国大学生智能汽车竞赛全国二、三等奖
中国机器人及人工智能大赛一、二等奖
第十七届全国大学生智能汽车竞赛讯飞智慧服务组全国二等奖

第十七届全国大学生智能汽车竞赛全国一、二、三等奖
三、车队介绍
① 极光电动方程式车队
产品介绍:

第一代电动方程式赛车Aurora-21(单电机)及主要技术参数

第二代电动方程式赛车Aurora-22(四电机)及主要技术参数
1、整车控制系统
自主构建电机外特性曲线,使四电机总消耗功率足目标功率。设计了驱动防滑系统,增加了车辆跑动稳定性。增设多种安全因子,以保证车手安全。
2、电机系统
选用 AMK DD5-14-10 电机,单个电机最高功率达到30kW。自制电机控制器箱体,对箱体内部进行孔位布置与合理线束。通过上位机软件 AIPEX PRO 对四个电机进行PID调教,逐步优化电机性能。
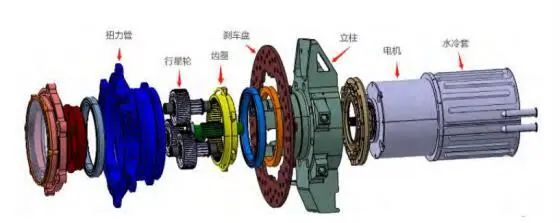
3、传动系统
AURORA-21:采用228电机,传动布局采用后驱形式。传动系统采用链轮传动的方式,实现了单极减速功能。同时自制差速器支架,实现链条张紧功能。结构简单稳定,拆卸方便。同时采用机械差速器,实现驱动轮间差速功能。对各个部件进行拓扑结构优化,使整体重量低至15Kg 。
AURORA-22:采用AMK电机,传动布局由后驱转变为四驱,车辆动态性能提升明显。同时自制轮边减速箱,结构采用无轮毂设计,使减速箱布局位置更加靠近轮毂内侧,减小电机和悬架转向干涉的风险,提供更大的轮边操作空间。自制水冷装置,在电机工作时长不变的情况下电机发热的温度降低50%以上。同时进行拓扑设计,使传动结构整体重量与上一辆单电机驱动赛车保持一致。
无轮毂式行星齿轮减速箱
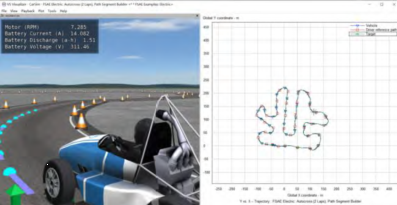
Carsim2020 联合仿真车辆运动姿态观测验证
② 飓风燃油巴哈赛车队 & 电光电动巴哈赛车队
产品介绍:

第一代燃油巴哈赛车

第二代燃油巴哈赛车

第一代电动巴哈赛车(初版渲染图)

Hurricane-21主要技术参数

Hurricane-22主要技术参数
产品亮点:
1、四驱动力传动系统
四驱动力传动系统可以将发动机输出的动力通过变速器,减速器传到前后轴四个车轮,通过分动器分配前后轴动力,尽量让赛车在特殊工况下不会出现动力过剩,即输出的驱动力大于地面附着力导致车轮在地面上空转的情况,四驱系统相对于前驱或后驱传动系统,可以更加充分利用发动即的动力,增加车辆在加速、爬坡时的性能。
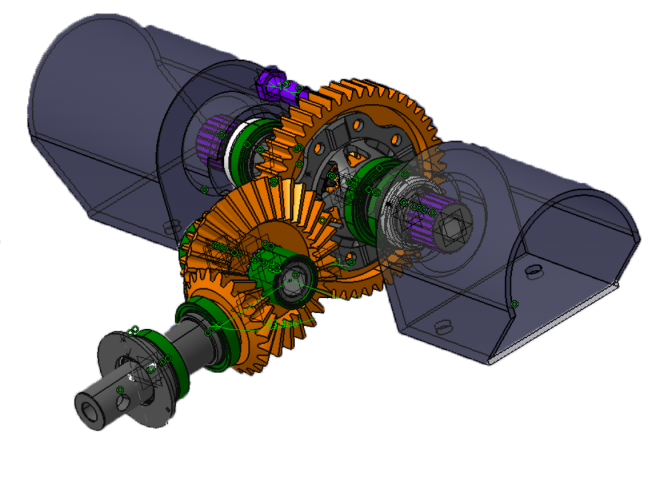
传动系统三维模型
2、悬架系统
悬架系统主要作用是传递作用在车轮和车身之间的力或扭矩, 缓解地面冲击对车身的影响,同时也让赛车在转向时有良好的车身 姿态,确保赛车有良好的平顺性,同时也要在减震的同时让车手能 清晰感受路面状况。 利用 Adams 进行动力仿真观察目标值的变化程度,对于不满足变化需求的目标进行 Insight 优化,不断迭代硬点,需要保证的目标参数有车轮倾角束角、主销内倾角,后倾角、轮距与侧倾中心高度、传递比、线刚度与角刚度。
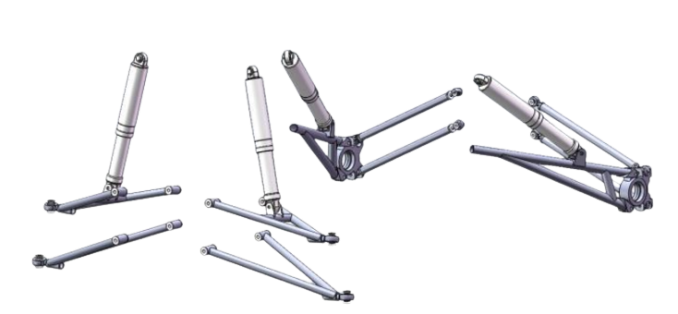
悬架系统三维模型
3、车架系统
车架的设计是在优先考虑规则的情况下,综合考虑车体其他结构的安装要求,最后结合人机工程,搭建台架结构进行车手模拟,利用CATIA 建模,建立了初版车架模型。 考虑到车架刚度及重量,最终选定车架整体采用 4130 钢管框架结构,并利用 ANSYS 做强度刚度的分析和校核,对车架进行了多方面的优化与改进,在优化过程中进行了结构优化和钢管尺寸优化,确定了车架的最终方案。

车身车架三维模型
③ AutoBots无人车队
车队简介:
AutoBots无人车队于2021年11月正式成立于城市交通与物流学院赛车工作室。是以全国大学生智能汽车竞赛、中国机器人人工智能大赛等各类大学生高水平科创竞赛为牵引,为建立覆盖全校的无人驾驶技术积累技术与人才而创建的车队。自2021年1月起,无人车队已参加各类国家级赛事五次,斩获多个奖项,尤其在无人车ROS竞速方向取得巨大突破。
产品介绍:
1. ROS小车:
ROS是一种系统,智能小车利用ROS系统能够实现各种功能 ROS(Robot Operating System)是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能。ROS提供一些标准操作系统服务,例如硬件抽象,底层设备控制,常用功能实现,进程间消息以及数据包管理。ROS是基于一种图状架构,从而不同节点的进程能接受,发布,聚合各种信息(例如传感,控制,状态,规划等等),目前ROS主要支持Ubuntu。

2. 无人自行车
无人自行车可以在没有驾驶者的情况下保持车身平衡,并通过传感器识别周边环境和物体,自动避开障碍物,实现复杂路况下的自动驾驶。

3. 远程驾驶小车
依托树莓派控制小车的运动,按照轨迹规划进行自主行驶,以及识别场景完成避障、识别语音做出反馈。树莓派,是为学习计算机编程教育而设计,只有信用卡大小的微型电脑,其系统基于Linux。

技术亮点:
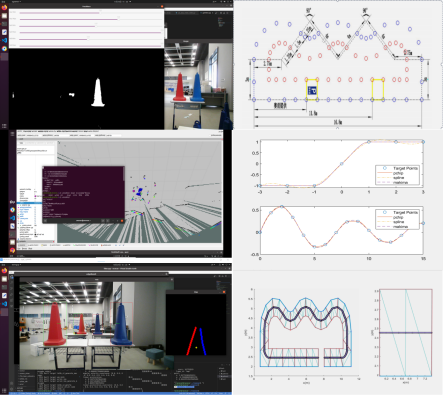
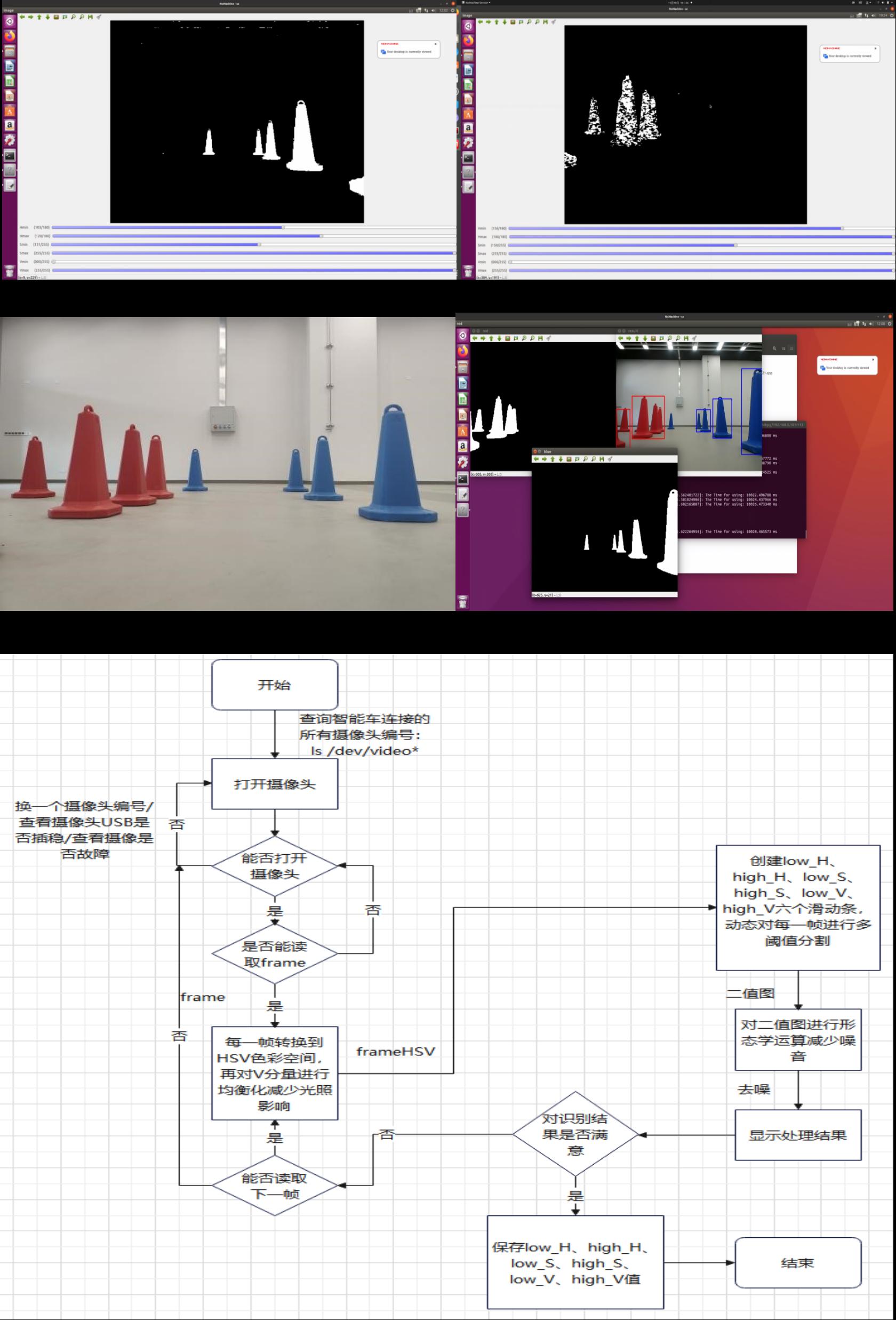
1、Racecar基于OpenCV的红蓝锥筒识别多传感器信息融合技术是指将来自不同传感器的信息进行整合,从而得到更加准确、全面的信息。在智能驾驶系统中,多传感器信息融合技术可以帮助车辆更好地感知周围环境,从而提高行驶安全性。
本次智能汽车室外竞速赛中第一圈控制汽车自动驾驶的传感器主要是摄像头,用于检测智能车前方的障碍物并依据检测结果执行路径规划。第二圈控制汽车自动驾驶的传感器主要是雷达,用于在建图后进行局部路径规划。
由于智能车在室外行驶的时候受外界环境的影响,使得相机、雷达采集的信号复杂、多变,所以对锥桶的识别算法要求要有很高的准确性和实时性。本次比赛的一个技术亮点,主要包括修正相机畸变,我们利用OpenCV的算法函数成功实现智能车对锥桶的检测,并在下一步基于视觉所成的图像进行路径规划。
2、在全国大学生智能汽车竞赛室外专项赛中,ROS竞速赛往往需要ROS无人小车依靠车载传感器对已有规定赛道进行障碍物检测和识别,如何有效地规划出一条可供ROS无人小车高速行驶的高精度路线,正是该赛项的其中一个难点。
摄像头和单线激光雷达融合的障碍物检测:对组成赛道的红蓝锥桶进行HSV动态调参后获得的数值与获取到激光雷达的数值后,将雷达与视觉传感器空间融合。
基于三角剖分法的路径规划:对已经获得到的锥桶位置信息后,使用三角剖分算法,并通过测试不断修改其插值方法,最终选定用pchip方法(分段三次 Hermite 插值多项式)规划出一条高精度的路径,以便后续ROS无人小车的跟踪控制。